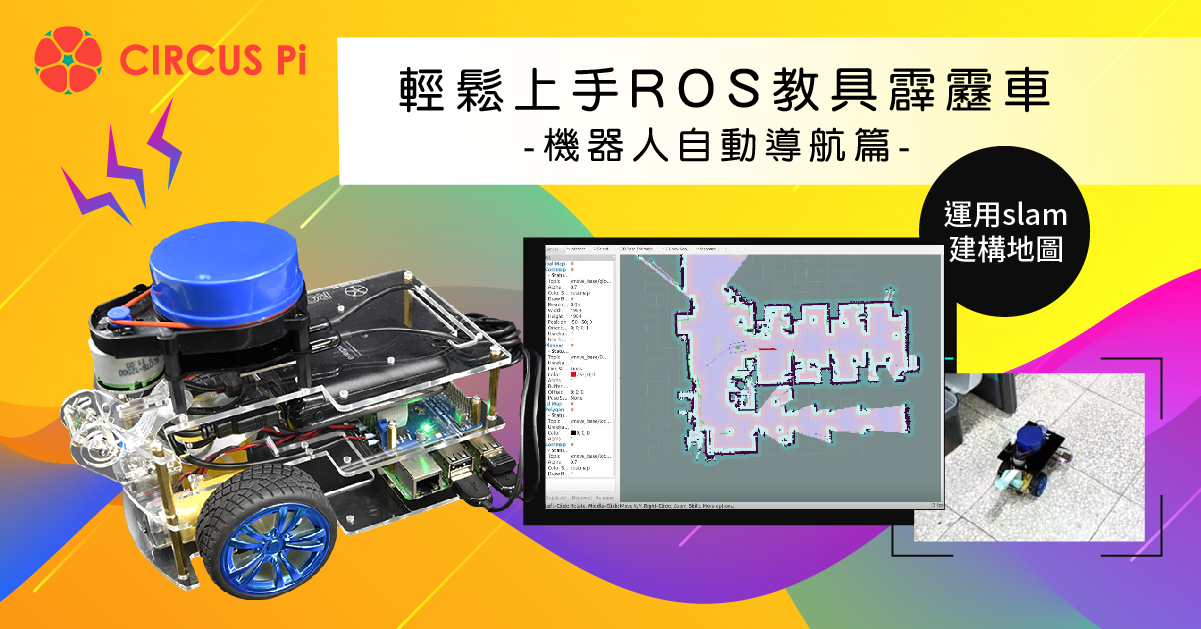
一、 ROS教具霹靂車簡介
CIRCUS Pi 所設計的ROS系統入門級教具 – 霹靂車,其中有一項特點讓學員感到非常有趣,卻也有點無所適從。這項特點即是
- 方便地擴充其餘硬體設備與增加額外功能,因為具有很多的GPIO腳位以及 USB 、wifi、藍芽等通訊通用接口 ( 霹靂車出產時將免費附贈一組 2.4G HZ wifi 無限搖桿 )

霹靂車上的接口設備
那麼,相信正在看這篇文章的你,也一定會有下列的疑問:
- 除了可以增加一個 2.4G HZ 無限搖桿,讓霹靂車可以變成遙控車之外,霹靂車到底還可以擴充什麼功能呢?
如果一直思考到底可以擴充什麼功能,或許真的想破頭也想不出來,因為可以擴充的東西實在太多太多了。為此,我們可以先想一下霹靂車目前為止的特點有什麼
- 可搭載 ROS系統的單板電腦
- 方便的無線通訊開發環境
- 馬達控制板的擴充,變成可快速研究與開發的移動平台
- 擁有 800萬像素的鏡頭
- 極其方便的行動電源組
將這些特點列出來後,我們可以發現,霹靂車作為移動平台的研究與開發之教具,可以發揮他最大的價值。因此我們可以從「自動駕駛」的方向思考,
- 原來的霹靂車已經可以使用鏡頭,完成影像辨識道路的自動駕駛功能。那麼,在自動駕駛技術方面,霹靂車還能夠幫助你學習到什麼呢?
為此,CIRCUS Pi 便將霹靂車額外的擴充一個「激光雷達( Lidar )」

室內型激光雷達
讓霹靂車搖身一變,成為一台「霹靂雷達車」囉 !

霹靂雷達車
二、 ROS教具霹靂車功能
霹靂雷達車新增了下列的功能:
- 偵測障礙物
- 使用 slam技術,建立地圖
- 使用 ROS系統開源的 Navigation 功能,自動導航至目的地
若是能夠學習上列的三項功能,將可以讓你對於自動駕駛技術,擁有更深刻的理解喔 ! 接下來,我們來看看霹靂雷達車這三項功能的介紹吧 !霹靂雷達車與偵測障礙物
霹靂雷達車所使用的雷達,只要利用 USB 接口,便可以完成「資料傳遞」與「供電」功能。需要特別注意的是,樹莓派本身的 USB接口,電流量的最大輸出電流,是小於雷達啟動瞬間的瞬間電流 (也就是樹莓派本身的 USB接口無法啟動雷達 ),因此建議使用額外的USB傳輸線,來供電給予激光雷達使用。

雷達模組接口 ( PWR:電源 、DATA:資料傳輸 )
ROS系統本身就擁有一個可視化工具「rviz」,幫助大家更容易地觀察激光雷達所回傳的資訊。

使用 Rviz 查看雷達傳回資訊畫面霹靂雷達車與slam技術 – 建立地圖
slam技術是同步定位與地圖構建( Simultaneous localization and mapping )的簡稱,slam相關資訊連結。
為了完成利用 slam技術建立地圖功能,霹靂雷達車上的電源部分需要重新分配。在前面章節「霹靂雷達車與偵測障礙物」中有提到,樹莓派本身的 USB接口無法啟動雷達,因此我們需要將行動電源的另一個輸出孔,給予激光雷達( 原先是給予馬達控制板用 );而馬達控制板的電源,將由單板電腦的 USB接口供應( 因霹靂雷達車的直流馬達需要的電流較小 )。

霹靂雷達車的馬達控制板將由單板電腦提供
完成後,便可以使用 ROS系統,完成 slam技術中的建立地圖功能囉 !

使用 Rviz 查看建立地圖畫面霹靂雷達車與slam技術 – 自動導航
當地圖建立好後,我們便可以使用這份地圖,利用 ROS系統現有的程式碼,完成自動導航的動作囉 !
(此影片為霹靂車開發者之一測試畫面,點此查閱開發者霹靂車github )
霹靂車擴充成霹靂雷達車後,可以使用、學習的功能就變得更多了呢 !
若是想要快速取得霹靂雷達車,可以直接點選下列連結,查看取得資訊喔!霹靂車 – 雷達導航組